Problem
Is the VIO system with full self-calibration weakly observable?
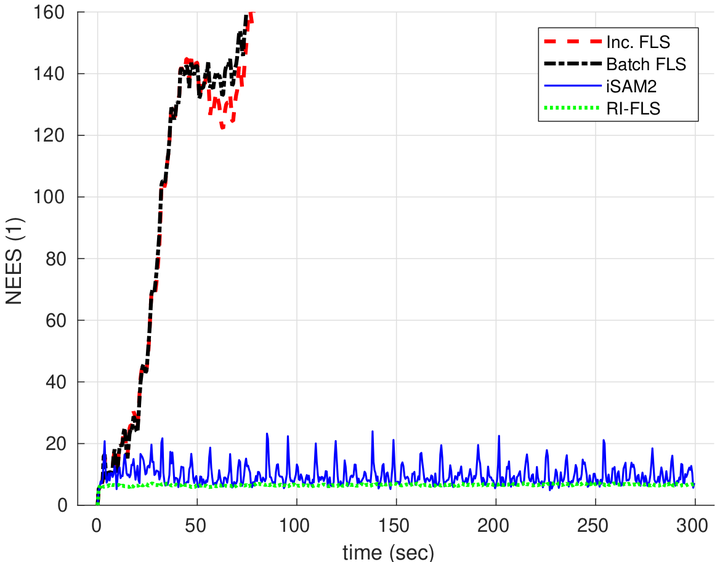
How to ensure consistent covariance estimation for optimization-based estimators?
Method
By using incremental observability analysis, we prove that the VIO with full self-calibration is observable. We also analyze the observability of time offset and camera readout time, both are observable unless in degenerate conditions.
To ensure the consistency of a FLS, we introduce the right invariant error formulation into the FLS framework and analyze the observability of a FLS with the right invariant error.
Related papers: