Problem 4D (X,Y,Z,Doppler) millimeter wave radars are able to operate in adverse conditions like smoke and rain. Lots of 4D radars are installed on automobiles. We are interested in solving the odometry and mapping problem with sparse point clouds from 4D radars. The challenge is about how to associate these sparse points and how to leverage the doppler data effectively.
Method
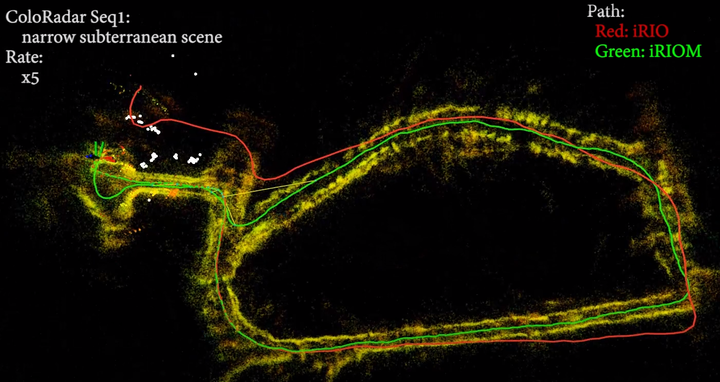
We develop a SLAM system for 4D radars, which features GNC (similar to IRLS)-based ego velocity estimation, distribution to multi distribution point association, and loop closure by PGO.
We also publish a large scale dataset with rich scenes and diverse motion profiles, snail-radar. The reference trajectories are generated by framewise registration to the TLS point clouds.
Related papers: